Драйвер. Шаговый двигатель.
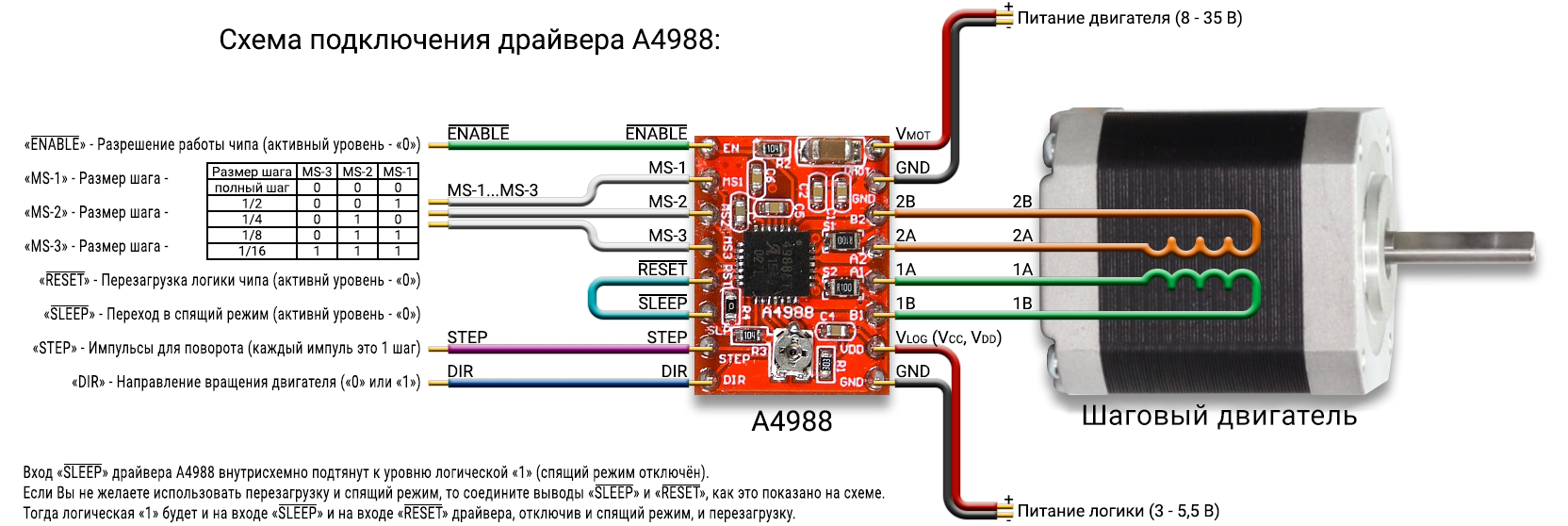
В проекте используются драйвера шагового двигателя (далее ШД) А4988 или А8825.
Какой драйвер выбрать? Прочтите эту статью, чтобы иметь представление о предмете, в конце приведены основные различия этих драйверов.
Драйвер желательно устанавливать также как и ESP32 - на гребенку.
Перед настройкой драйвера ESP32 должна быть установлена на плату и в нее должен быть загружен скетч Самовара.
Питание и ШД не подключаем.
Берем драйвер, ориентируясь по обозначениям выводов на плате драйвера и печатной плате, вставляем в гребенку, .
Проверяем прозвонкой мультиметром. На контактах GND должна быть масса, на VMOT +12 вольт от разъема питания VIN, на VDD +3,3 от первого контакта ESP32.
Подаем питание 12 вольт на разъем VIN. Можно еще раз проверить факт наличия напряжений.
На печатной плате, для драйвера предусмотрены переключатели:
- Н1 - соединяете все три контакта
- SW1 - если есть переключатели, то все в положение ВЫКЛ (OFF) . Если нет переключателей - перемычки пока не ставите.
Теперь нужно настроить драйвер.
Двигатель не подключаем.
Драйвер штука нежная. Есть даже рекомендации настраивать с отключением питания.
Т.е. чуть-чуть крутнули подстрочный резистор, подали питание, замеряли напряжение, сняли питание - опять крутнули . И так все время. Пока не установите нужное.
Есть и другой, более быстрый способ.
Отвертка с изолированной ручкой. Один щуп мультиметра подключаем в любом месте на печатной плате к массе (GND), вторым либо аккуратно прикасаемся к подстроечнику и крутим отверткой ползунок, либо вешаем на щуп "крокодил", цепляем его на жало отвертки и крутим отверткой через крокодил.
Методику настройки смотрим по ссылкам.
Подключение шагового двигателя.
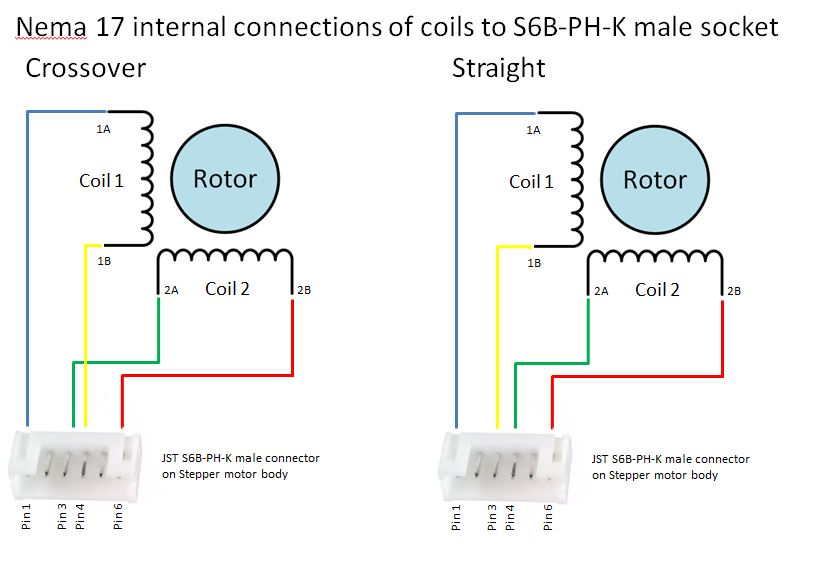
В проекте используется биполярный ШД NEMA17. Сначала проверяем соответствие ШД проекту.
Биполярные ШД имеют две независимые обмотки. Двигатели разных производителей могут иметь разное расположение выводов.
Подключаем к ШД разъем с проводами, который был в комплекте, берем любой провод и прозвонкой мультиметром ищем ему пару. Это одна обмотка. Помечаем оба провода. Проверяем вторую пару. Прозваниваеся - хорошо.
Теперь берем любой провод с одной пары и любой провод со второй. Прозванием. Они не должны звониться. Если есть прозвон - это не биполярный двигатель.
Теперь подключаем ШД к разъему на печатной плате. По рисунку выше 1А-1В это одна обмотка, 2А-2В это другая. "А" это начало обмотки "В" это конец. Можно, конечно, подключить четко по обозначениям, но это не обязательно.
Главное подключить одну обмотку к контактам 1А-1В драйвера, а вторую к 2А-2В. Не важно какую куда, и не важно начало это обмотки или конец.
Подключили. Подаем питание. Двигатель не крутится. Открываем web-интерфейс и даем команду на отбор.
Вал двигателя должен начать вращаться.
Двигатель гудит и не крутится; Двигатель крутится рывками
-
Проверьте правильность и наличие подключения двигателя к драйверу. Именно к драйверу, а не только к печатной плате.
-
Проверьте что на контактах драйвера RST,SLP присутствует +3,3 вольта.
-
В web-интерфейсе на вкладке Настройки - Калибровка шагов шагового двигателя, если установлено значение 8000 (или подобное) измените на 800
(пост с форума: ...была подобная ситуация при настройке Самовара.Отличие драйвер TMC2208. Проблема решилась подбором деления шага, насос стабильно заработал только на 1/8, на других режимах, либо гудел, либо работал рывками с дикими пропусками (хотя на другом устройстве этот драйвер и насос работали на всех делителях отличие было только в управляющих сигналах 5в а не 3,3в). Возможно это как-то связано с частотой следования импульсов STEP, тогда попробовать подобрать в окне «Калибровка шагового двигателя» параметр «скорость шагового двигателя» (допустим установить 4000 а не 8000). А после калибровать на 100ml.
Не забываем выбор режимов работы ШД осуществлять при полном отключении питания печатной платы Самовара.)
Если вал вращается не в ту сторону которую нужно, на подключении к плате, у любой из обмоток меняем провода местами.
Примечание.
В файле Samovar_ini.h присутствует строка, которая позволят изменить вращение программно:
//#define STEPPER_REVERSE //изменить направление вращения шагового двигателя
Но удобнее один раз перебросить провода, чем все время, при обновлении, включать параметр.
Погоняете двигатель на разных скоростях через программу отбора. Выставьте отбор 70-150 мл/час. Возьмитесь одной рукой за корпус двигателя а второй попытайтесь остановить вал, если вал легко остановился, нужно вернуться к настройкам драйвера и немного поднять напряжение. Буквально на 0,02-0,04 вольта.
Снова проверьте насколько легко можно остановить вал.
Приклейте на чип драйвера радиатор идущий в комплекте.
Теперь можно ставить головку насоса. Предварительно смажьте ролики и трубку нейтральной силиконовой смазкой. Смазку нужно будет проводить периодически (раз в 5-7 перегонов), это увеличит срок службы роликов, трубки, да и двигателю будет легче.
Погоняйте с насосом, посмотрите нет ли остановок, не слышно ли перегрузки двигателя, насколько греется двигатель и радиатор чипа драйвера...
Теперь можно перейти к тонкой настройке, если в этом есть необходимость.
Немного теории.
В отличие от традиционных двигателей постоянного и переменного тока, шаговые двигатели движутся дискретными шагами или приращениями, отсюда и название «шаговый».
Каждый шаг шагового двигателя соответствует точному угловому вращению. Обычно углы шага шаговых двигателей составляют 1,8° или 0,9°, что соответствует полному обороту, разделенному на 200 или 400 шагов соответственно.
Стандартные NEMA17 имеют угол поворота 1,8°за 1 шаг (200 шагов на полный оборот)
Двигатель может работать в нескольких режимах - полношаговый и микрошаговый.
Полношаговый режим это когда двигатель за 1 шаг делает поворот вала на 1,8°
При полношаговом режиме двигатель имеет самый высокий крутящий момент среди всех режимов.
Микрошаг- это деление стандартного шага на несколько микрошагов.. Разделить стандартный шаг можно на 2, на 4; 8;16 и 32 части
Настроить деление шага можно переключателями SW1
MS1, MS2, MS2 – контакты выбора разрешения микрошагов. С их помощью мы можем выбрать один из пяти режимов:
Для драйвера A4988
|
MS1
|
MS2
|
MS2
|
Шаги
|
|
откл
|
откл
|
откл
|
Полный
|
|
вкл
|
откл
|
откл
|
1/2
|
|
откл
|
вкл
|
откл
|
1/4
|
|
вкл
|
вкл
|
откл
|
1/8
|
|
вкл
|
вкл
|
вкл
|
1/16
|
Для драйвера A8825
|
MS1
|
MS2
|
MS2
|
Шаги
|
|
откл
|
откл
|
откл
|
Полный
|
|
вкл
|
откл
|
откл
|
1/2
|
|
откл
|
вкл
|
откл
|
1/4
|
|
вкл
|
вкл
|
откл
|
1/8
|
|
откл
|
откл
|
вкл
|
1/16
|
|
вкл
|
вкл
|
вкл
|
1/32
|
Пояснение.
Допустим выбран режим 1/4. При этом за 1 микрошаг вал двигателя повернется на 1,8°/4 = 0,45° что будет соответствовать 200*4 = 800 (или если считать иначе 360°/0,45° = 800) микрошагам на 1 полный оборот вала.
При микрошаговом режиме двигатель имеет пониженный крутящий момент, но повышенную плавность и точность (что не особо важно для проекта)
Шаговые двигатели в полношаговом режиме создают более высокие уровни вибрации и шума.
Микрошаг существенно снижает вибрацию и шум, что приводит к более плавной и тихой работе двигателя.
В общем посмотрите и послушайте как работает ваш ШД. Можно попробовать различные режимы и сравнить.
Внимание.
Выбор режимов работы ШД осуществляется при полном отключении питания печатной платы Самовара.
После того как определитесь с режимом работы ШД, поставите dip-переключатели в нужное положение (или окончательно распаяете перемычки) нужно будет сделать калибровку насоса. Калибровку нужно делать каждый раз, если вы решите сменить режим работы двигателя.
На точность отбора также влияет регулярность смазки насоса. Чем реже смазываете - тем меньше фактическая скорость отбора.
Различия между драйверами двигателя DRV8825 и A4988
( популярно, без специфичных особенностей )
-
Различное расположение потенциометра, регулирующего предельный ток.
-
Драйвер на DRV8825 поддерживает 1/32-шаг в микрошаговом режиме.
-
Драйвер A4988 максимум 1/16-шага.
-
Драйвер DRV8825 обеспечивает ток до 1,5А на фазу без радиатора,
-
Драйвер А4988 обеспечивает ток 1А на фазу без радиатора.
-
Драйвер А4988 дешевле драйвера DRV8825.
Справочная информация.